Method
The problem considered is to generate a trajectory for a robot that yields high-quality 3D models of a bounded
target scene and fulfills robot constraints like time and path length. However, finding
the best sequence of viewpoints is time-consuming and prohibitively expensive. We adopt the
greedy strategy and trade it as a Next-Best-View (NBV)
problem. At each step of the reconstruction, the information
gain of viewpoints within a certain range of the current
position of a robot are evaluated based on the partial reconstruction
scene. An informative path considering both the
information gain and the path length is then planned and
executed. Images captured along the view path are selected
and are fed into the 3D reconstruction of next step. The
process is repeated until some critera are met.
Under the greedy strategy, our pipeline consists of three
components: a Mobile Robot module, a 3D Reconstruction
module and a View Path Planning module and shown as below:

The Mobile Robot module takes the images at given viewpoints
and the robot locates itself by a motion capture system.
During the simulation, Unity Engine renders images at
given viewpoints. The 3D Reconstruction module reconstructs
a scene by combining an implicit neural representation
(e.g. NeRF) and a volumetric representation (A
coarse TSDF). The implicit neural representation provides
high quality 3D models with fine-grained details and also
neural uncertainty as the information gain for the view path
planning. The coarse TSDF filter viewpoints and establishes
an occupancy grid map for efficient distance and occupancy
query, and viewpoint filtering. The View Path Planning
module first leverages volumetric representations for efficient
viewpoint selection, approximates the information gain field
by a MLP and plans an informative view path based the
A* algorithm.
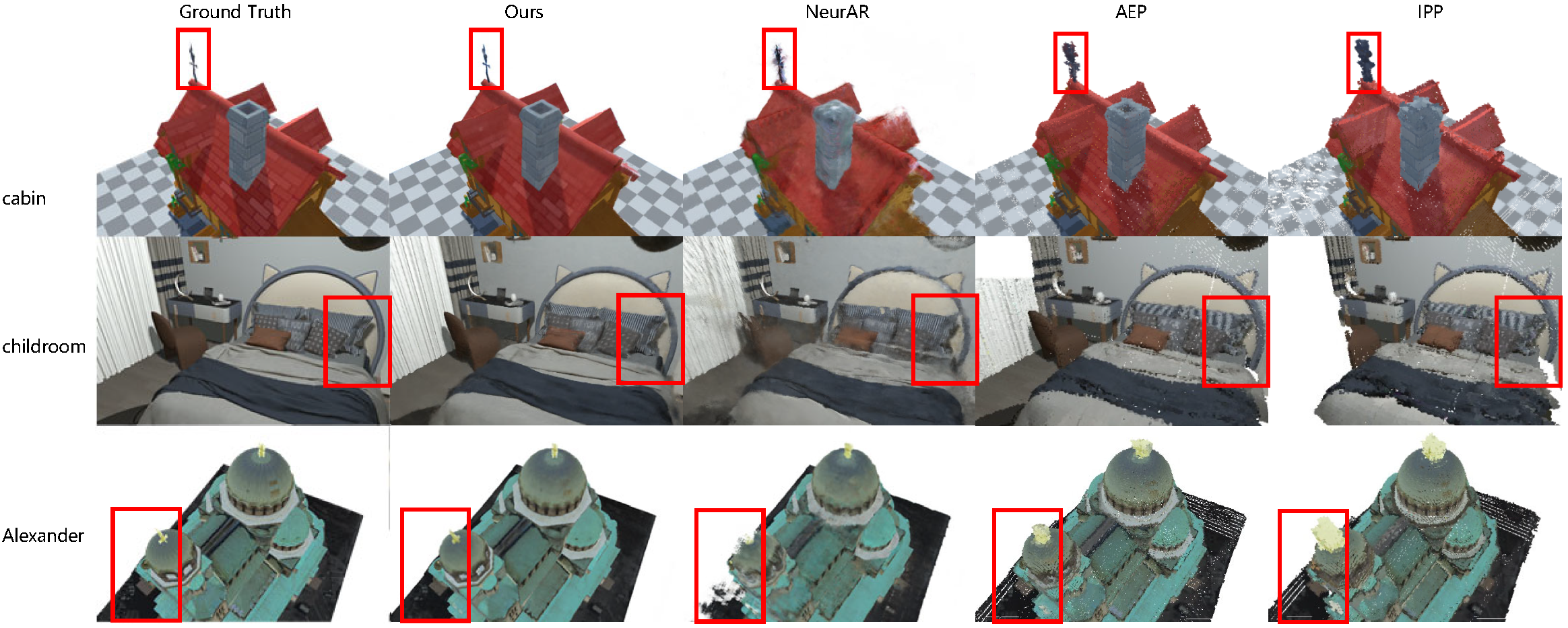
Performance
Comparison of the reconstruction scenes
Trajectories and the reconstruction results
The results are seen from top view in childroom scene.
The experiment on a real scene
Related works
Some related works also focus on autonomous implicit reconstruction:
- NeurAR: Neural Uncertainty for Autonomous 3D Reconstruction NeurAR
Bibtex
@inproceedings{zeng2023efficient,
title={Efficient view path planning for autonomous implicit reconstruction},
author={Zeng, Jing and Li, Yanxu and Ran, Yunlong and Li, Shuo and Gao, Fei and Li, Lincheng and He, Shibo and Chen, Jiming and Ye, Qi},
booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},
pages={4063--4069},
year={2023},
organization={IEEE}
}